随着工业4.0和智能制造的快速发展,信息物理系统(CPS)作为物理过程与计算、通信技术深度融合的核心平台,在智能工厂、智慧城市、自动驾驶等领域发挥着关键作用。CPS的运行环境常常面临不确定性、外部干扰和网络延迟等挑战,这要求控制系统不仅要具备高精度和实时性,还需具备强大的鲁棒性。集成鲁棒模型预测控制(Robust Model Predictive Control, RMPC)架构应运而生,它结合了模型预测控制的多步优化能力和鲁棒控制的抗干扰特性,为CPS的稳定和高效运行提供了有力支持。本文将从CPS的基本概念出发,探讨集成RMPC架构的设计原理、关键技术及其在网络技术服务中的应用前景。
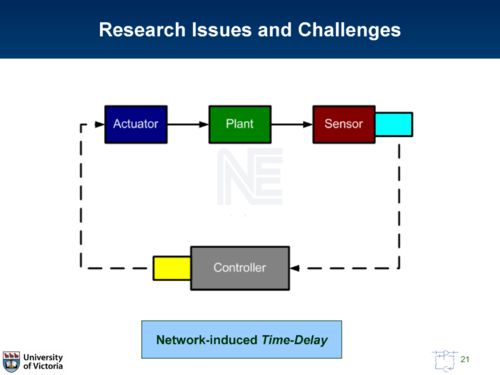
信息物理系统通过传感器、执行器和通信网络将物理世界与信息空间紧密连接,形成一个闭环反馈系统。在CPS中,控制算法需要处理来自物理环境的实时数据,同时应对模型不确定性、参数波动和外部扰动。传统的控制方法如PID控制虽然简单易用,但在复杂动态系统中往往难以保证性能。模型预测控制(MPC)通过在线优化未来一段时间内的控制输入,能够处理多变量约束和动态响应,但其对模型精度的依赖较高。为此,鲁棒MPC架构被引入,它利用集总不确定性描述或随机优化方法,确保系统在不确定条件下的稳定性和安全性。例如,通过min-max优化或 tube-based 方法,RMPC可以有效地抵消扰动影响,适用于CPS中的关键应用,如电网调度或机器人导航。
集成RMPC架构的核心在于将鲁棒性与预测控制相结合。这通常涉及模型建立、不确定性量化、优化求解和实时调整等步骤。在模型建立阶段,需考虑CPS的离散或连续动态,并引入不确定性集,如多面体或椭球体描述。在优化求解中,RMPC采用鲁棒优化技术,如线性矩阵不等式(LMI)或场景方法,以最小化最坏情况下的性能指标。随着网络技术的发展,RMPC架构可以集成云计算和边缘计算服务,实现分布式控制和数据共享。例如,在工业物联网中,RMPC可以通过网络服务获取实时传感器数据,进行远程优化,并将控制指令下发至执行器,从而提升系统的响应速度和可靠性。
网络技术服务在集成RMPC架构中扮演着重要角色。现代CPS依赖于高速、低延迟的通信网络,如5G或工业以太网,以确保控制循环的实时性。网络服务提供数据采集、传输、存储和分析功能,支持RMPC的在线实施。例如,通过云平台,RMPC可以访问历史数据和机器学习模型,以改进不确定性预测;网络安全措施如加密和认证机制,能够保护控制指令免受网络攻击。在实际应用中,这种集成架构已成功用于智能交通系统,其中RMPC优化车辆队列控制,网络服务处理车联网通信,从而提高道路安全和效率。
信息物理系统的集成鲁棒模型预测控制架构结合了先进的控制理论和网络技术,为应对不确定环境提供了可靠解决方案。随着人工智能和大数据技术的发展,RMPC有望进一步融合自适应学习和分布式优化,推动CPS在更多领域的应用。网络服务将不断演进,提供更智能、安全的支撑,助力实现工业自动化和智慧社会的愿景。研究者和工程师应关注这一领域的创新,以提升系统性能和鲁棒性。